Built in
the years '60, this telescope is located at our stellar station at Serra
La Nave (mt 1750 asl).
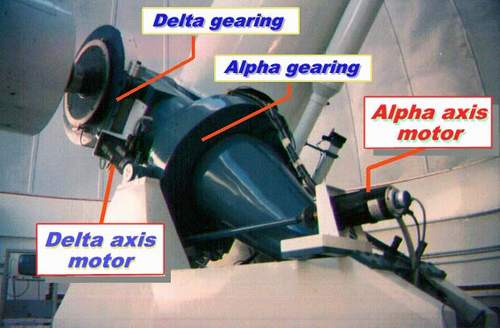
In order to achieve a good level of automation of the pointing system,
the original mechanics has been modifyed by our staff.
The original system of a.c. motors and gear-boxes was upgrated with
only two brushless motors capable of run, with constant torque, up to
5000 rpm.
The same motor, therefore, allows a positioning of the telescope without
jerks by a soft moving, up to a fast speed at the telscope of 1 degree
for second.
For both axis of the telescope, the original transission system of endless screw & toothed wheel has been mechanically interfaced with two incremental encoders for a pointing with an accuracy better of 5 arcsec.
The "glue" between mechanics and software is electronics.
From the hardware of motors to the user's interface, the system has four levels of feedback: for the control the speed of the motors, the precision of their speed, their positioning and the position of the whole telescope.
An intelligent motion controller (by Galil) performs a second and a third level of feedback with a digital control of the speed and the position of the telescope.
The supervising control is done by a Pentium @ 600 MHz Personal Computer. There the Asterix software check the position of the telescope and ensures that the requested star is into the observing field.
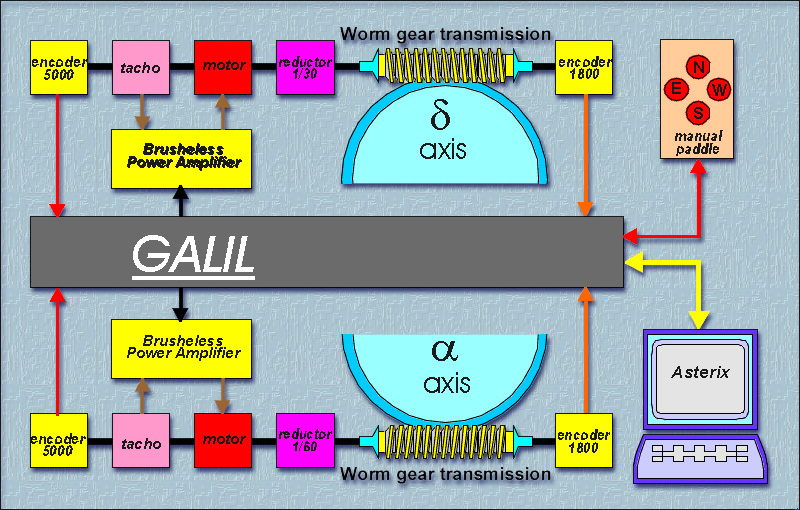
The first level of feedback (the analogic) is drawn in brown.
The second level of feedback (the digital for speed) is drawn in red.
The third level of feedback (the digital for positioning) is drawn in orange.
The fourth level of feedback (the software for pointing) is drawn in yellow.
In addiction, this program has several utilities that are described in the AsteriX user manual.